ADSKO:
Analog-Digital-Servosignal-KOnverter
ADSKO:
Analogue-Digital-Servosignal-KOnverter
Die Grundidee hinter dem ADSKO
The basic idea behind the ADSKO
 Weil die Digitaltechnik relativ problemlos eine höhere als
die bei Analogservos übliche Ansteuerfrequenz von 50 – 70 Hz verträgt,
konnte beispielsweise das Potential moderner Gyrosysteme voll ausgeschöpft
werden; diese liefern mit bis zu 330 Hz (robbe/Futaba GY-601) Korrektursignale
für das Heckservo, und entsprechend gut funktioniert die
Hochachsenstabilisierung mittlerweile.
Weil die Digitaltechnik relativ problemlos eine höhere als
die bei Analogservos übliche Ansteuerfrequenz von 50 – 70 Hz verträgt,
konnte beispielsweise das Potential moderner Gyrosysteme voll ausgeschöpft
werden; diese liefern mit bis zu 330 Hz (robbe/Futaba GY-601) Korrektursignale
für das Heckservo, und entsprechend gut funktioniert die
Hochachsenstabilisierung mittlerweile.
Aber nicht nur am
Heck ist ein schnelles Servo von Vorteil, auch die Gasfunktion profitiert in
hohem Maße davon – zumindest bei Einsatz eines Drehzahlreglers. Ein
Drehzahlregler registriert mittels eines Hall-Sensors die Rotation kleiner,
beispielsweise am Lüfterrad oder an der Hauptrotorwelle eines Helis befestigter
Magnete. Je nach zeitlichem Auflösungsvermögen der dahinterstehenden
Auswerte-Elektronik kann damit die Motor- bzw. Hauptrotordrehzahl mehr oder
weniger exakt bestimmt werden. Im Falle einer Abweichung von der vorgegebenen
Solldrehzahl öffnet bzw. schließt der Regler dann entsprechend das
Vergaserküken, bis sich die gewünschte Umdrehungszahl wieder eingestellt hat.
Es ist einleuchtend, dass je schneller das Gasservo agiert, desto besser kann
die Regelung bereits auf kleine Drehzahlschwankungen reagieren, und desto
besser wird die Hauptrotordrehzahl im Endeffekt konstant gehalten.
Since digital
technology works well with a much faster than the usual 50 – 70 Hz
control frequency for analogue servos it was possible to take gyro technology
to new spheres; modern gyro systems like the robbe/Futaba GY-601 send
correction commands to the tail servo with up to 330 Hz, and thus the tail performance
is nothing short of excellent.
But the tail
rotor is not the only thing in a R/C helicopter that benefits from a fast
servo; the throttle function does as well, at least in combination with a
governor. A governor is a little device that uses a so-called hall sensor to
detect the rotation of small magnets attached to e.g. the cooling fan or the
main shaft of a helicopter. Depending on the time resolution of the governor's
electronics the engine or main rotor speed can be determined more or less exactly;
if the RPM value deviates from the set speed the governor automatically opens
or closes the throttle until the RPM reaches the desired value again. It is
obvious that the faster the servo, the better the control system can smooth out
even minor RPM fluctuations, and the better the main rotor speed is kept
constant.
 Es bestand folglich das Bestreben, einen Drehzahlregler
des Typs robbe/Futaba GV-1 zusammen mit einem schnellstmöglichen Gasservo
einzusetzen. Das derzeit wohl weltweit schnellste Servo ist das
robbe/Futaba-Heckservo S9251 (0,05 Sek./45° und 37 Ncm bei 4,8 Volt), das nur
in Kombination mit dem Kreiselsystem GY-601 verwendet werden kann. Aufgrund der
hohen Ansteuerfrequenz (Repetitionsrate) von 330 Hz seitens des Gyros mußte
nämlich die Impulsbreite gegenüber den standardmäßigen, vom Empfänger
gelieferten rund 1,52 Millisekunden (Neutralimpuls) auf 0,76 Millisekunden halbiert
werden (siehe Abbildung links; zum Vergrößern klicken). Leider bedeutet dies,
dass ein Betrieb direkt am Empfänger oder eben an einem Drehzahlregler wie dem
GV-1 unmöglich ist. Das Ziel war also, eine kompakte Elektronik zu entwickeln,
welche die vom Drehzahlregler kommenden Impulse für das Gasservo abfängt und in
das vom S9251 benötigte Format transferiert, inklusive der hohen
Ansteuerfrequenz für maximale Servoleistung.
Es bestand folglich das Bestreben, einen Drehzahlregler
des Typs robbe/Futaba GV-1 zusammen mit einem schnellstmöglichen Gasservo
einzusetzen. Das derzeit wohl weltweit schnellste Servo ist das
robbe/Futaba-Heckservo S9251 (0,05 Sek./45° und 37 Ncm bei 4,8 Volt), das nur
in Kombination mit dem Kreiselsystem GY-601 verwendet werden kann. Aufgrund der
hohen Ansteuerfrequenz (Repetitionsrate) von 330 Hz seitens des Gyros mußte
nämlich die Impulsbreite gegenüber den standardmäßigen, vom Empfänger
gelieferten rund 1,52 Millisekunden (Neutralimpuls) auf 0,76 Millisekunden halbiert
werden (siehe Abbildung links; zum Vergrößern klicken). Leider bedeutet dies,
dass ein Betrieb direkt am Empfänger oder eben an einem Drehzahlregler wie dem
GV-1 unmöglich ist. Das Ziel war also, eine kompakte Elektronik zu entwickeln,
welche die vom Drehzahlregler kommenden Impulse für das Gasservo abfängt und in
das vom S9251 benötigte Format transferiert, inklusive der hohen
Ansteuerfrequenz für maximale Servoleistung.
The basic idea
was to take a robbe/Futaba GV-1 governor and combine it with the fastest
throttle servo available. The robbe/Futaba gyro servo S9251 (0.05 sec./45° and
37 Ncm at 4.8 Volts) currently is one of the world's fastest servos; it can
only be used together with the gyro system GY-601. Because of the gyro's high
output frequency (repetition rate) of 330 Hz the pulse width which is normally
1.52 ms (neutral pulse) had to be reduced to 0.76 ms (see small picture; click
to enlarge). Unfortunately, this implies that you cannot plug the servo into
the receiver or the governor directly. So the idea was to develop a compact
electronics that transforms the governor's control pulses for a standard servo
to the format required by the S9251, including the higher control frequency for
maximum servo performance.
Wie
funktioniert der ADSKO?
How does the ADSKO work?
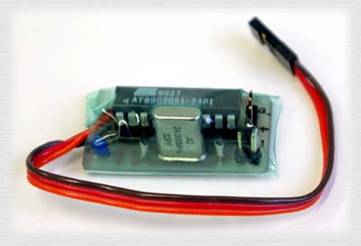
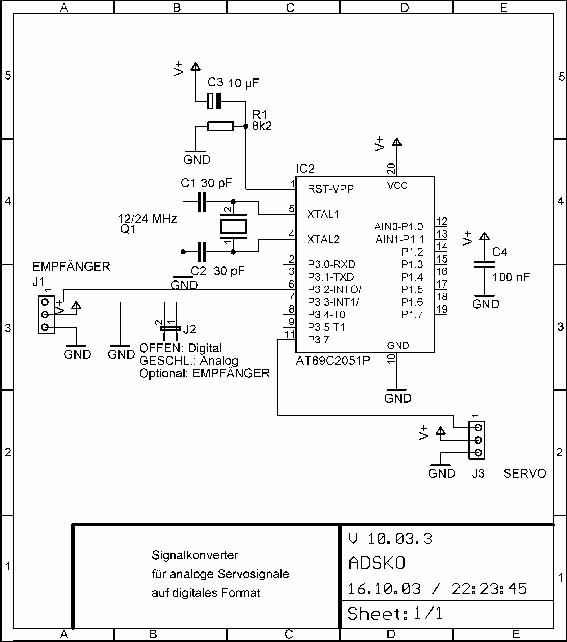
Der Aufbau des nur
9,7 g leichten ADSKO (Analog-Digital-Servosignal-Konverter) ist recht einfach
und übersichtlich gehalten, wie anhand des Schaltplans leicht zu erkennen ist.
Das Kernstück ist ein Mikrocontroller des Typs ATMEL 89C2051, der mittels eines
24 MHz Industriequarzes getaktet wird und über zwei integrierte Timer verfügt.
Der erste wird verwendet, um das Ausgangssignal des Drehzahlreglers abzutasten
(Pulsweitenmessung); die zeitliche Auflösung beträgt hierbei 10 Bit. Der zweite
Timer dient sowohl der Generierung der Ausgabepulsweite, als auch der
benötigten Repetitionszeit (z.B. 330 Hz). Die eigentliche Arbeit erledigt ein
kleines C-Programm, welches im Flash des ATMEL-Controllers gespeichert ist; das
Ganze arbeitet mittels einer intelligenten Interrupt-Steuerung. Das Gerät
funktioniert absolut fehlerfrei; um die Betriebssicherheit weiter zu erhöhen,
wäre ein Aufbau in SMD-Technik sinnvoll. Entwickelt und realisiert wurde der
ADSKO im Übrigen von HeliGraphix-Elektronikexperte Siegmar
Roth.
The ADSKO
(Analogue-Digital-Servosignal-Konverter) weighs only 9.7 g, and the design is
quite simple as you can see in the circuit diagram. The core is an ATMEL
89C2051 micro controller clocked by a 24 MHz industrial crystal. It has got two
integrated timers; the first one is needed to scan the governor's output signal
(measurement of the pulse width) at a resolution of 10 bits, whereas the second
one is used to generate both the higher repetition rate of 330 Hz as well as
the modified pulse width. The main work is done by a clever little C-program
stored in the ATMEL controller's flash memory; it all comes down to an
intelligent interrupt control. The device has been working flawlessly; to
increase the operation safety even more it would be best to rebuild the
electronics using SMD technique. The ADSKO has been developed and built by
HeliGraphix electronics expert Siegmar Roth.
|
|
|
|
|
|
|
Bevor das
kompilierte C-Programm des |
... ATMEL 89C2051 geladen wird, |
|
|
|
|
|
|
|
|
|
|
Das
Programmiergerät "GALEP-III" dient |
Schaltplan
des ADSKO |



{kind=link}
Alles schön
und gut, aber ist dies physikalisch plausibel?
Very well, but does this
make sense from a physical point of view?
 Um es vorweg zu nehmen, die ganze Aktion war als
Aprilscherz 2004 für das Helikoptermagazin ROTOR konzipiert. Es lohnt jedoch,
einen genaueren Blick auf ein paar interessante Details zu werfen. Die Materie
ist im einzelnen reichlich komplex, mit ein paar Vereinfachungen erhält man
aber einen guten Einblick in die Vorgänge bei einer Drehzahlregelung.
Um es vorweg zu nehmen, die ganze Aktion war als
Aprilscherz 2004 für das Helikoptermagazin ROTOR konzipiert. Es lohnt jedoch,
einen genaueren Blick auf ein paar interessante Details zu werfen. Die Materie
ist im einzelnen reichlich komplex, mit ein paar Vereinfachungen erhält man
aber einen guten Einblick in die Vorgänge bei einer Drehzahlregelung.
To come to the
point, the whole development was intended to be an April-fool joke for the
R/C helicopter magazine ROTOR. It is well worth, however, to have a closer
look at some interesting aspects. Things are quite complex in detail, but with
just a few simplifications you get a good idea of what RPM governing is all
about.
Die Ausgangsfrage
lautet: Wie schnell kann ein Modellmotor überhaupt auf eine veränderte
Leistungsanforderung reagieren? Da prinzipiell mit jeder Umdrehung der
Kurbelwelle ein Füllen des Zylinderraumes mit einem veränderten
Luft/Treibstoffgemisch möglich ist, beispielsweise etwas spritreicher für mehr
Leistung, beträgt die Reaktionszeit bei typischen 15.000 U/min. 4 Millisekunden
(entsprechend 250 Hz). Je höher die Drehzahl, desto kürzer die theoretische
Reaktionszeit. In der Praxis wird die Zeit um einiges länger sein, da
das Volumen des Kurbelgehäuses und der hohlen Kurbelwelle nicht Null ist und
ein geändertes Sprit/Luft-Gemisch sich erst einmal durch diesen Raum bewegen
muß. Auch benötigt das Vergaserküken eine endliche Zeit, um entsprechend weit
geöffnet zu werden, d.h. es steht nicht urplötzlich ein verändertes Gemisch zur
Verfügung. Zum dritten ist unklar, wie lange es dauert, bis der Motor sich auf
die neuen Verhältnisse eingestellt hat und wieder in einer Art
"Gleichgewichtszustand" läuft.
Geht man vom besten
Falle der 4 Millisekunden aus, dann wäre eine Ansteuerung des Vergaser-Servos
mit der ADSKO-Taktfrequenz von 330 Hz (ca. 3,0 ms) sinnvoll.
The basic
question is: How fast can a model engine react to a change in power
demand. In principle the cylinder can be filled with a different fuel/air
mixture (e.g. a little richer for a higher power output) every revolution of
the crankshaft; at a typical 15,000 engine RPM this is equivalent to a reaction
time of 4 ms (or 250 Hz, respectively). The higher the engine speed the shorter
is the theoretical reaction time. In
reality the engine will take longer, first because the volume of the crankcase
and the hollow crankshaft is not zero and the new fuel/air mixture has to move
through it before it finally reaches the cylinder. Second, the throttle doesn't
open in no time, i.e. it will take some time until the desired fuel/air mixture
is available. And third, it is unclear how long the engine takes until it has accustomed
to the new conditions and runs stable in kind of a state of
"equilibrium" again.
In the best case
of 4 ms reaction time it makes sense to control the throttle servo with
the ADSKO output frequency of 330 Hz (ca. 3.0 ms).
Speziell der zu den
Geräten der Oberklasse zählende Drehzahlregler GV-1 ermöglicht laut
beiliegendem Datenblatt eine Erfassung der Motordrehzahl mit lediglich ± 6
U/min. Dies bedeutet, die Regelung wird erst dann aktiv werden, wenn die
Solldrehzahl um mehr als 6 U/min. unter- oder überschritten wird. Auch
ermöglicht das Gerät "nur" eine Regelung auf ± 1% der
Vorgabe-Drehzahl (dazu mehr im nächsten Abschnitt). Die Ausgabe von
Stellbefehlen an das Gasservo erfolgt lediglich alle 20 ms (d.h. mit 50 Hz).
Dies bedeutet, der Regler ist bis hierhin das schwächste Glied in der Kette.
Der Einsatz des ADSKO bringt nur einen marginalen Vorteil, da das superschnelle
Gasservo S9251 (eigentlich ja ein Heckservo) minimal schneller seine
Soll-Position anfährt.
Sinnvoll wäre ggf.,
den Regler zu verbessern, sprich eine schnellere und genauere Drehzahlerfassung
zu realisieren und den ADSKO sozusagen gleich mit zu integrieren, d.h. also die
Servosignale gleich mit 330 Hz (3,0 ms) auszugeben.
The GV-1
belongs to the high-end systems of model helicopter governors. The
control resolution is ± 6 engine RPM; this means that the control system will
become active when the actual engine speed deviates from the desired speed more
than 6 RPM. The speed stability accuracy is "only" 1% (also see next
section). Commands to the throttle servo are merely sent every 20 ms (50 Hz).
So until this point the governor itself is the weakest part of the whole
system. The ADSKO is only of very little use because the superfast throttle
servo S9251 (normally a gyro servo) will reach its desired position not
noticeably faster.
It would make
sense to improve the governor. The control resolution would have to be better
and the ADSKO needs to be integrated into the system; the output to the
throttle servo would then be at a real 330 Hz (3.0 ms).
Fazit bis hier: Der ADSKO allein ohne eine bessere als die derzeit
erhältlichen Drehzahlregelungen bringt keinen praktischen Nutzen. In der
Realität ist auch der Unterschied zwischen einem Standard- und einem
schnelleren Heckservo auf Gas kaum spürbar. Sinnvoll ist, ein Gasservo zu
wählen, das mindestens so schnell ist wie das/die Pitchservo(s).
The conclusion
until here is that the ADSKO alone without a better governing system than
those currently available is of no practical use. In reality the difference
between a standard and a faster tail servo for controlling the throttle
function is barely noticeable. It is best to choose a throttle servo that
matches the speed of the pitch servo(s).
Weitere
Überlegungen
Further considerations
 Mitunter aufgrund der begrenzten Geschwindigkeit der
Pitchservos kann eine Last am Hauptrotor nur mit endlicher Geschwindigkeit
auftreten. An einem mit drei S9252 bestückten Three Dee NT
(CCPM-Taumelscheibe) dauert eine Pitchänderung von 8° (von Schwebe-Pitch auf
Maximal-Pitch) mindestens ca. 73 Millisekunden (Laufzeit der Servos 0,10
Sekunden für 45° bei 4,8 Volt). Je besser eine Regelung, desto eher und
schneller wird sie eine sich anbahnende Drehzahlabweichung registrieren und im
Keime zu ersticken versuchen; der über BBT vertriebene Bordrechner Gyroner von Roland Frech benutzt unseres
Wissens sogar eine senderseitige Gaskurve, um genau diesem Umstand Rechnung zu
tragen.
Mitunter aufgrund der begrenzten Geschwindigkeit der
Pitchservos kann eine Last am Hauptrotor nur mit endlicher Geschwindigkeit
auftreten. An einem mit drei S9252 bestückten Three Dee NT
(CCPM-Taumelscheibe) dauert eine Pitchänderung von 8° (von Schwebe-Pitch auf
Maximal-Pitch) mindestens ca. 73 Millisekunden (Laufzeit der Servos 0,10
Sekunden für 45° bei 4,8 Volt). Je besser eine Regelung, desto eher und
schneller wird sie eine sich anbahnende Drehzahlabweichung registrieren und im
Keime zu ersticken versuchen; der über BBT vertriebene Bordrechner Gyroner von Roland Frech benutzt unseres
Wissens sogar eine senderseitige Gaskurve, um genau diesem Umstand Rechnung zu
tragen.
Um eine optimale
Performance in Sachen Vergaserservo-Ansteuerung zu erreichen und zu entscheiden,
in wieweit eine schnellere Ansteuerung etwa mittels ADSKO sinnvoll ist, sind
etliche weitere Daten zur Regelcharakteristik des Drehzahlreglers erforderlich.
Eine essentielle Information beispielsweise ist, wie sich der Regler im
Differentialfall verhält, also wenn abrupt eine starke Last auftritt; wird
das Vergaserküken dann sofort voll geöffnet, oder erfolgt zunächst eine eher
verhaltene Öffnung?
Es gilt weiterhin
zu bedenken, daß ein Motor nur bei einer bestimmten Drehzahl seine volle
Leistung abgeben kann – daher haben Sie im Auto auch eine
Gangschaltung. Weil es diese bei Helis bislang nicht gibt, bedingt ein Abfallen
von dieser optimalen Drehzahl eine zunächst verstärkte weitere Drehzahlabnahme
bei konstanter Last.
Since the speed
of the pitch servo(s) is limited the main
rotor can load the engine only within a finite time. A change in pitch
angle of 8° (from hover to full pitch) takes a Three Dee NT equipped with three S9252 (eCCPM swashplate control)
at least ca. 73 ms (servo speed is 0.10 sec./45° at 4.8 Volts). The better a
speed control system, the sooner and quicker it will react to any deviations
from the desired value and try to nip them in the bud; as far as we know the
BBT Gyroner designed by Roland Frech
uses a throttle curve from the transmitter to realize kind of a look-ahead
function.
In order to
achieve an optimum throttle control and to decide whether or not the ADSKO
makes sense, a lot more data on the characteristics of the governor is
necessary. For instance, it is essential to know how the governor reacts in the differential case, i.e. when a high
load is imposed on the engine abruptly. Does the governor fully open the carb
at once, or is it opened with restraint?
What's more an engine will only provide its maximum power
at a certain RPM – that's why you have gear shifting in your car.
Since there's no such thing in R/C helicopters so far, a deviation from this
optimum engine speed will cause the RPM to drop even further if the load
doesn't change.
 Die optimale Regelung läßt die Drehzahl erst gar nicht
spürbar einbrechen. Trotzdem stellt sich die Frage, wie schnell ein Rotorsystem
nach einem Drehzahleinbruch durch eine erhöhte Leistungsabgabe des Motors
überhaupt wieder beschleunigt werden kann. Auch hier erfolgt eine Abschätzung
für den besten Fall; es wird angenommen, ein 90er Heli (4,5 kg und 1,60
m Rotordurchmesser) schwebt mit einer Drehzahl von gut 1.800 U/min.
(Motordrehzahl ca. 15.000 U/min.) außerhalb des Bodeneffektes und benötigt
hierzu grob abgeschätzt 650 Watt, inklusive aller Verlustleistungen (Kühlung,
Reibung, etc.). Maximal kann ein O.S. 91 SX C-spec. Motor laut Datenblatt im
Idealfall ca. 2.100 Watt abgeben. Im Lastfalle stehen bei unendlich schneller
Vergaseröffnung und Motorreaktion also ca. 1.450 Watt Differenzleistung zu
Verfügung. Vernachlässigt man in erster Näherung etwas fahrlässig die komplette
(!) Aerodynamik und beschränkt sich rein auf die Kinematik (Bewegung der
Massenschwerpunkte der Rotorblätter), dann zeigt die Simulation, daß allein für
eine Drehzahlerhöhung um 50 U/min. eine Zeit im Bereich von mindestens 50
Millisekunden erforderlich ist; und das im wirklich allerbesten Falle!
Die optimale Regelung läßt die Drehzahl erst gar nicht
spürbar einbrechen. Trotzdem stellt sich die Frage, wie schnell ein Rotorsystem
nach einem Drehzahleinbruch durch eine erhöhte Leistungsabgabe des Motors
überhaupt wieder beschleunigt werden kann. Auch hier erfolgt eine Abschätzung
für den besten Fall; es wird angenommen, ein 90er Heli (4,5 kg und 1,60
m Rotordurchmesser) schwebt mit einer Drehzahl von gut 1.800 U/min.
(Motordrehzahl ca. 15.000 U/min.) außerhalb des Bodeneffektes und benötigt
hierzu grob abgeschätzt 650 Watt, inklusive aller Verlustleistungen (Kühlung,
Reibung, etc.). Maximal kann ein O.S. 91 SX C-spec. Motor laut Datenblatt im
Idealfall ca. 2.100 Watt abgeben. Im Lastfalle stehen bei unendlich schneller
Vergaseröffnung und Motorreaktion also ca. 1.450 Watt Differenzleistung zu
Verfügung. Vernachlässigt man in erster Näherung etwas fahrlässig die komplette
(!) Aerodynamik und beschränkt sich rein auf die Kinematik (Bewegung der
Massenschwerpunkte der Rotorblätter), dann zeigt die Simulation, daß allein für
eine Drehzahlerhöhung um 50 U/min. eine Zeit im Bereich von mindestens 50
Millisekunden erforderlich ist; und das im wirklich allerbesten Falle!
{kind=link}
{kind=link}
The ideal speed
governor will keep the RPM from changing noticeably. Still the question arises
how long it takes to reaccelerate the rotor
system after a drop in RPM. An estimation for the best case looks as follows: a 90-sized heli with 4.5 kg mass and a
rotor diameter of 1.6 m needs app. 650 Watts (including friction, cooling,
etc.) for hovering out of the ground effect at a head speed of somewhat over
1,800 RPM (engine speed 15,000 RPM). The maximum power output of a O.S. 91 SX
C-spec. is 2,100 Watts under ideal conditions. If it takes an infinitely short
time both to fully open the carb and for the engine to react, then the power
available for reaccelerating the rotor is about 1,450 Watts. When neglecting
the complete (!) aerodynamics at first approximation and only looking at the
kinematics (motion of the CGs of the rotor blades), the simulation reveals that
an increase in head speed of just 50 RPM takes at least 50 ms, and this is in
the very best case!
Großes Fazit: Auch unter idealen Bedingungen scheint eine
Verbesserung der gegenwärtigen Systeme zur Drehzahlregelung in
Helikoptermodellen mit Verbrennungsmotor schwer möglich. Die Materie ist nicht
ganz einfach, und das letzte Wort in dieser Angelegenheit ist noch nicht
gesprochen. Für Ihre Ideen, Anmerkungen und Kommentare sind wir wie immer sehr
offen. Mailen Sie uns!
To finally sum up, an improvement of the current speed governors for
R/C helicopter models with i/c engines seems to be hard to accomplish. The
whole subject is rather complex, and for sure we haven't heard the last of it.
As always we're grateful for your ideas and comments; just drop a line!
![]()